Hi guys,
It’s been a while and I’ve been grounded! Looking to fly again soon. Still got to put some time in on the mario fold!
Hi guys,
It’s been a while and I’ve been grounded! Looking to fly again soon. Still got to put some time in on the mario fold!
@jpmreece Welcome Back ![]()
Hello and welcome back indeed! Hope you and yours are well!
Grand. Just been really busy trying to get a house move sorted.
What about you?
yep, really busy too. Still not got any self-builds in the air. Thinking of selling them all and getting something I can actually fly!
Dude, I’ll be happy to help either on call or I’ll build/fix . It’s the day of the hobby I love.
What’s the state of the fleet?
Hi mate and thanks. The problem with just about all of them is that when I attempt to fly them they lift to the side. I’ve been thinking lately, that this may be me on the controls adding some unintentional rudder as I increase the motor speed to lift off…
If I’m correct, this would have the effect of causing the craft to attempt to turn, but as it’s still on the ground, or just off, it would result in the craft flipping.
I have a 7" ready to give my theory a test by being very careful in moving the throttle/speed control only.
I’ll let you know how I get on…
This is one of two things, motor direction or FC orientation. You’re using Betaflight?
Yes mate, BF… I’ll double check motor direction & FC orientation before next test flight. Thanks mate
I’d you want a sanity check, send through some photos.
Morning mate, there appears to be an electronics issue, here’s why I came to that conclusion:
TX = RM TX15 Max - ELRS version = 3.0.0
RX ELRS version = 3.6.0
Testing on the following:
7" - 2207/1500
10" 3115/900
H680 3115/900 (hex)
I’ve tested this on three different craft, two have the same FC the other, a hex, has a different one.
All appears well, the TX>RX>FC comms work as expected - the model in BetaFlight responds to the sticks.
Mode switches respond as expected.
Unplug USB - NO PROPS - Arm and test controls work as expected.
However when connected to the USB and monitoring the motors in BF, they are not stable, even though the craft and sticks are not moving.
Now, I’m aware the craft will keep it’s self stable by adjusting the speed of the motors/props to balance, but when the craft isn’t moving I would expect the motors to remain constant.
Also, when testing connected to the USB/BF I noticed the motors sometimes continue to increase in speed even though the stick has been released.
I have wondered if the slight miss match in ELRS version might have anything to do with the issues - I’m going to update the TX/controller to the same version 3.6.0 and re-test
I’d be interested to hear any comments/suggestions. The Bin has been muted!
The control loops will cause the motors to increase in speed if the crest does not move as it expects. This is normal and part of the control algorithms.
Check the motors are in the correct locations first. Spin motor 1, then 2 etc
Then check they are spinning the right direction, grab a piece of paper or card and gently place it into the motor bell.
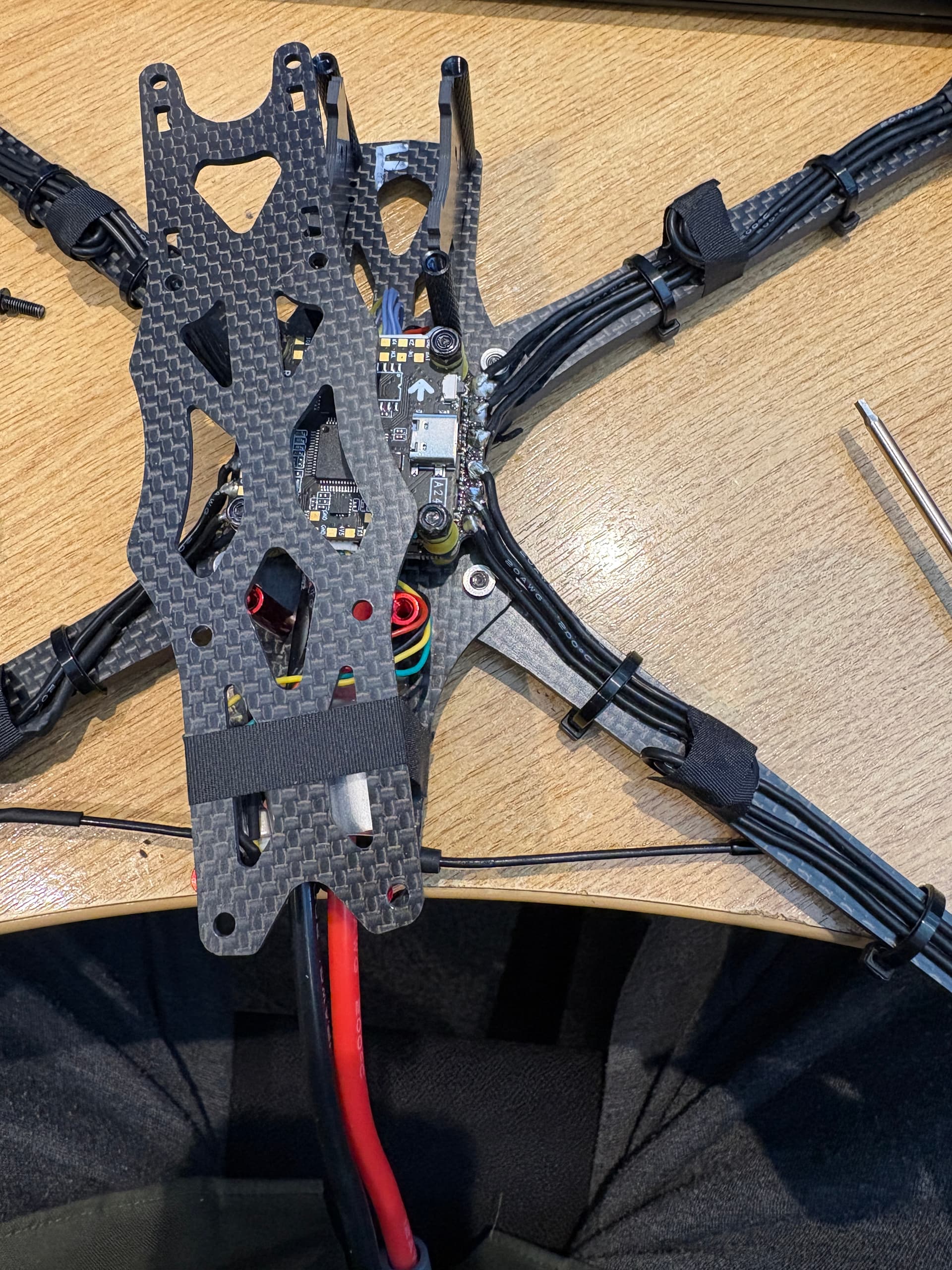
Can you send me a picture of the FC in the frame?
yep, It’s pointing the right way, if that’s what you want to check… Notice the Arrow and the ‘F’ in front of the camera mounting side plates
Yep, I’ve checked for correct rotation, I’m confident they’re all going the right way… However, I’ll double check…
BTW - The upgrade/flash of the TX/RC to the same ELRS version helped a little, it improved the instability of the motors somewhat
UPDATE: I’m going to revisit this later in the week and see if I can get this in the air too…
Sorry, remote begging - I have to ask the silly questions. No offence intended!
Are you running props in or out?
NO Props for testing. However, when testing outside I add the props with the leading edge in the direction of travel. If that makes sense?
It’s generally quoted from the cameras point of view. If you imagine your the camera, props out is the blades moving towards past you. Props in is the opposite.
There is a setting in Betaflight that affects the software but not the direction. Getting this wrong will cause the effect you’re seeing.
Morning mate, many thanks for the clarification. The ‘Leading edge’ is the part of the prop that is the highest and thickest. That said, I install the props with the leading edge at the ‘front’ of the prop in the direction of travel.
I think this is correct as this is what generates the lift required, The shape of the prop playing the part of the aeroplane wing, as it were…
I think Now I just need to get out in some space and give some of them a try…
Hello Mate, you’ll never guess what I did today?!
I managed to sort out the 10" Quad I’ve had problems with, In no small part down to you and your comment about the orientation of the motors and props!
Well, I checked the motors NO PROPS, on the bench, confirmed they matched the direction shown on the BF Motors page/tab.
Then outside with the props on, give it a try. No luck, after several battery changes and attempts, I realised the batteries I’ve tried thus far just aren’t powerful enough. So with the help of the BIG Boy - 6S/6000mAh/100C Having confirmed the Props were on the correct motors using stop-start and V slow rotation.
I then very gingerly feathered the sticks and managed to get the thing in the air FINALLY!!
It was only a short flight and was only a few feet off the ground, but it was finally OFF the ground under it’s own steam, so to speak!
I’m out tomorrow and hoping to get a chance to give it a try with more space. If I manage it, I’ll let you know how I get on… Many thanks for your help, guidance and everything along the way. We’re not out of the woods yet, there are more to go…