I’m building my second iNav drone and my quad arms but roll porch and yaw do not respond to my transmitter. The channels are mapped and responding in the reciever tab.
Any suggestions welcomed as to what I might be missing.
I’ve just flashed Betaflight to confirm the quad flies but I felt that I had to use the release candidate as I’m a professional geek!
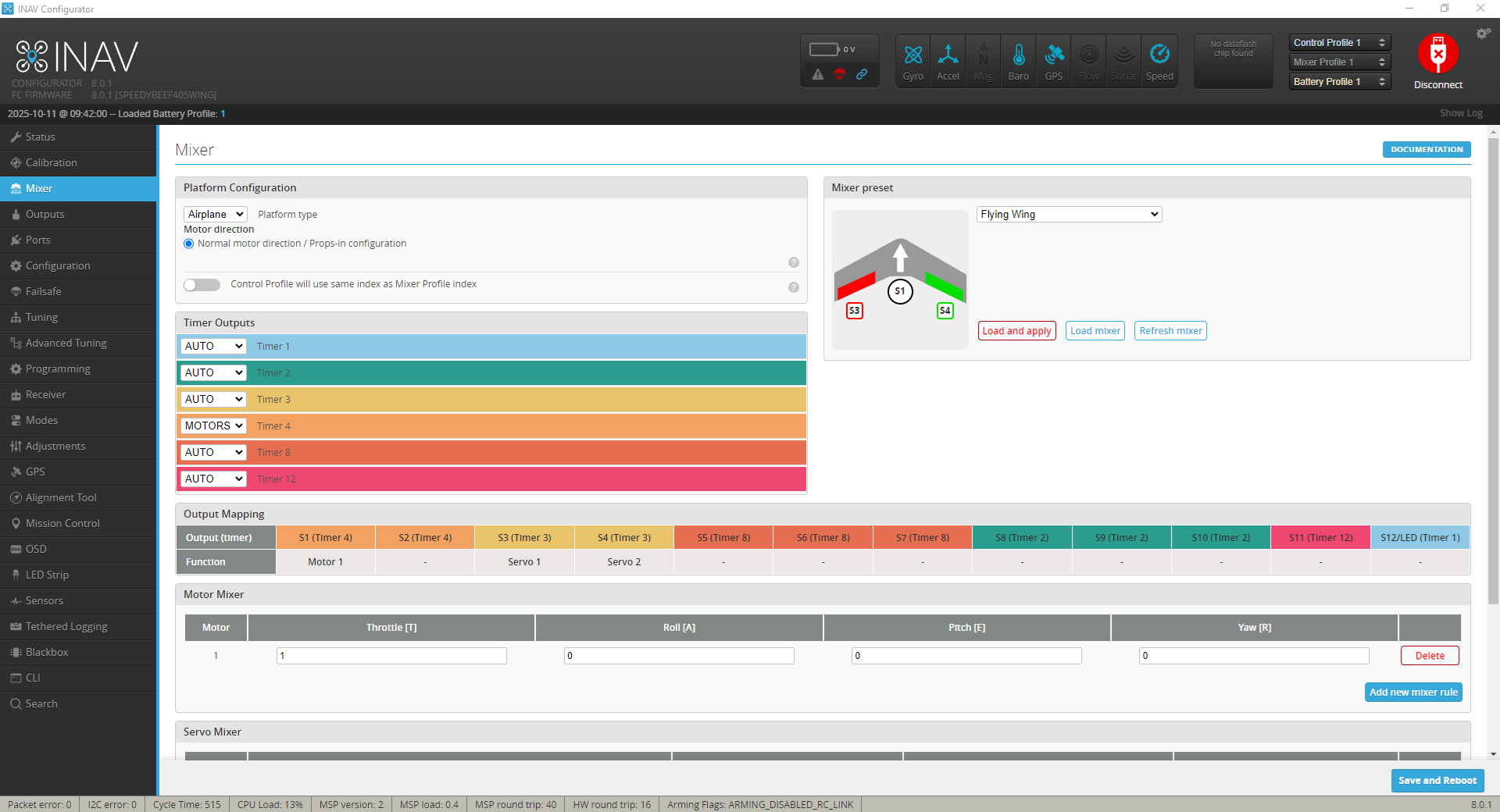
I’m building a wing and had a similar issue having been away from iNav for a number of years. I eventually found I needed to map the servo and motor output in the mixer tab.
I’m on iNav 8.0.1, yours will show a Quad not a wing.